
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(7 produits disponibles)




























 Prêt à être expédié
Prêt à être expédiéBroches GPIO (Entrée/Sortie à Usage Général)
Les broches PWM du Raspberry Pi 3 offrent une flexibilité dans le contrôle de divers appareils. Les broches GPIO peuvent être utilisées pour la modulation de largeur d'impulsion (PWM), entre autres fonctions comme l'entrée ou la sortie numérique. Cela les rend idéales pour les projets qui nécessitent un contrôle précis des moteurs ou des LED.
Broches d'Alimentation
L'utilisation de la bonne alimentation électrique pour le Raspberry Pi 3 est essentielle pour maintenir ses performances et sa longévité. L'entrée d'alimentation principale est la broche d'alimentation GPIO, qui fournit au Pi la tension requise, généralement 5 volts. Il existe également des broches de masse qui assurent une connexion stable en fournissant plusieurs options de mise à la terre.
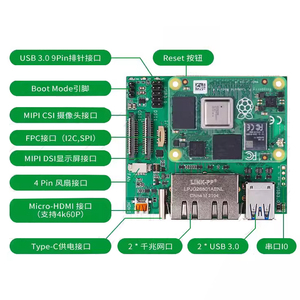
Broches d'Interface Série Caméra (CSI) et d'Interface Série d'Affichage (DSI)
Le Raspberry Pi 3 dispose de connecteurs dédiés pour les caméras et les écrans, ce qui est un bel ajout à ses fonctionnalités. Les broches CSI permettent aux utilisateurs de connecter des caméras pour des projets de photographie et de vidéo. En revanche, les broches DSI permettent la connexion d'écrans tactiles, faisant du Raspberry Pi une solution tout-en-un pour de nombreux projets.
Ports USB et Ethernet
Les ports USB offrent des options de connectivité pour les claviers, les souris et autres périphériques, ce qui étend la fonctionnalité du Raspberry Pi en tant que mini-ordinateur. Les ports Ethernet offrent une connexion Internet, essentielle pour les projets basés sur le réseau ou les mises à jour logicielles. Il est essentiel pour les utilisateurs de connaître le nombre de ports USB et Ethernet dont dispose le Raspberry Pi 3 lors de la planification de leurs projets.
Spécifications Techniques
Le Raspberry Pi 3 dispose de 40 broches GPIO, qui peuvent être utilisées pour diverses applications, notamment PWM, SPI et I2C. Il contient des broches qui fonctionnent à une tension d'alimentation de 5 V et une fréquence PWM d'environ 1 kHz pour faciliter le fonctionnement fluide des moteurs et la gradation précise des LED, ce que souhaitent les utilisateurs.
Broches PWM
Le Raspberry Pi 3 possède 2 broches PWM qui produisent des cycles de service variables, ce qui est essentiel pour contrôler des appareils tels que des moteurs ou des LED. Ces broches permettent des réglages précis, ce qui les rend adaptées aux projets qui nécessitent un contrôle de la vitesse ou un réglage de l'intensité lumineuse.
Fonctionnement
La modulation de largeur d'impulsion sur ces broches est réalisée à l'aide du système d'exploitation du Raspberry Pi 3 modèle b et de bibliothèques telles que RPi.GPIO ou pigpiod. En ajustant le cycle de service du signal PWM, on peut contrôler la tension moyenne fournie à un appareil externe. C'est essentiel dans les applications où il est nécessaire de gérer la puissance sans modifier la tension d'alimentation.
Spécifications Mécaniques
En termes de construction physique, les broches GPIO du Raspberry Pi 3 sont plaquées or pour assurer une connectivité solide, réduisant la corrosion et assurant des signaux stables dans le temps. De plus, les broches sont également disposées dans un format d'en-tête qui facilite la connexion de cavaliers appropriés ou même de chapeaux (Hardware Attached on Top) conçus sur mesure.
Utilisation des broches PWM
Connectez un appareil approprié, tel qu'un moteur ou une LED, à la broche PWM choisie sur le Raspberry Pi 3. Utilisez un langage de programmation comme Python pour contrôler le cycle de service du signal PWM via les broches GPIO. Ajustez la sortie PWM dans le code pour correspondre aux exigences de l'appareil, permettant ainsi un contrôle précis de la vitesse, de la luminosité ou d'autres paramètres.
Applications Pratiques
Les broches PWM du Raspberry Pi 3 peuvent être utilisées de différentes manières, par exemple pour contrôler les moteurs en robotique, ajuster la luminosité des LED ou même créer un simple pistolet thermique avec contrôle de la température. Les projets qui nécessitent des niveaux de puissance variables pour résister à une augmentation de la charge, tels que les éléments chauffants, peuvent grandement bénéficier de l'utilisation de la PWM pour gérer efficacement la tension et le courant de sortie.
Maintien d'une Chaleur Constante
L'un des avantages les plus importants du contrôle PWM est qu'il peut maintenir une chaleur constante sur des appareils tels que les pointes de soudure ou les éléments chauffants. En manipulant le cycle de service, les utilisateurs peuvent répondre à des exigences de chauffage spécifiques et éviter la surchauffe ou le sous-chauffage des composants. Il est également idéal pour les systèmes de contrôle climatique.
Contrôle de la Vitesse des Moteurs CC
Les broches PWM du Raspberry Pi 3 peuvent également contrôler la vitesse des moteurs CC, augmentant ainsi la vitesse des moteurs et améliorant la précision dans les applications robotiques telles que les robots mobiles ou les bras automatisés. L'ajustement du signal PWM facilite l'atteinte de la vitesse ou du couple souhaité sans dépassement ou fluctuation excessive.
Outils et Équipement de Base
En utilisant les broches PWM du Raspberry Pi 3, les utilisateurs peuvent créer des systèmes de contrôle pratiques en préparant des éléments tels qu'une carte Raspberry Pi 3, un moteur CC, une alimentation externe pour le moteur, et des fils et des résistances de connexion pour construire des choses de base et expérimenter.
Configuration du Raspberry Pi 3
Connectez le Raspberry Pi à un moniteur, un clavier et une souris pour le configurer. Après avoir chargé le système d'exploitation sur le Pi, connectez-vous à Internet et installez toutes les bibliothèques nécessaires pour accéder aux fonctions GPIO et PWM. Les broches GPIO doivent ensuite être identifiées et les broches pertinentes pour la sortie PWM doivent être choisies.
Connexion des Composants
Une fois toutes les préparations terminées, les composants peuvent être connectés. Le moteur CC a été connecté à la broche PWM et à la masse à un circuit externe d'alimentation. Pour réguler les niveaux de tension, des résistances ont été connectées entre la broche GPIO et le moteur afin de protéger le Raspberry Pi de tout dommage potentiel.
Programmation des Signaux PWM
En utilisant un code simple, les utilisateurs peuvent démarrer le moteur CC pour produire des signaux PWM variables via les broches GPIO. L'ajustement du cycle de service a permis de modifier la vitesse du moteur et d'offrir un contrôle simple sur les appareils connectés. Des codes plus complexes pourraient être utilisés pour intégrer les entrées de l'utilisateur ou la rétroaction des capteurs pour des opérations automatisées.
Qualité et Longévité des Composants
La qualité des résistances, des condensateurs et des connexions affecte directement la fiabilité du système PWM. Les composants de qualité supérieure durent généralement plus longtemps et maintiennent des signaux plus stables. Les connecteurs plaqués or ou résistants à la corrosion garantissent que le système reste fiable dans le temps.
Inspections Régulières
Les utilisateurs doivent effectuer des inspections régulières du système en examinant les connexions physiques pour détecter les signes d'usure et en vérifiant le code pour les optimisations. Cela facilite le processus de maintenance et minimise les temps d'arrêt dans les applications critiques.
Gestion de la Chaleur
Des dissipateurs thermiques ou des ventilateurs doivent être ajoutés au système pour des performances optimales lors des tâches exigeantes. Le maintien de températures de fonctionnement plus basses prolonge la durée de vie des composants internes et réduit les erreurs dues à la surchauffe.
Nettoyage
Le nettoyage de l'espace de travail empêche les débris de pénétrer dans le système. De plus, il faut se concentrer sur le nettoyage du matériel physique et du logiciel. Le nettoyage du code permettra d'affiner les algorithmes de contrôle, offrant ainsi des opérations plus efficaces.
Test et Calibration
Les utilisateurs doivent élaborer un calendrier pour les tests et la calibration afin de s'assurer que les capteurs et les actionneurs fonctionnent correctement. De petites erreurs dans les lectures des capteurs ou les réponses des actionneurs peuvent s'accumuler avec le temps ; une calibration régulière résout ces problèmes avant qu'ils ne deviennent graves.
Utilisez une bibliothèque comme RPi.GPIO ou pigpiod pour activer la PWM sur le Raspberry Pi 3. Le cycle de service spécifie la valeur PWM pour ajuster la tension du signal de sortie à un appareil externe.
Le cycle de service est calculé en déterminant son niveau de luminosité par rapport au niveau de courant maximal qui lui est fourni. Le pourcentage est ensuite obtenu en divisant le niveau de luminosité souhaité par le niveau maximal et en multipliant par 100.
Oui, les broches PWM peuvent être partagées dans le temps entre différents appareils en utilisant un multiplexeur de broches GPIO ou en basculant entre les appareils dans le logiciel selon les besoins.
La fréquence maximale des broches PWM sur le Raspberry Pi est d'environ 1,5 kHz. Cependant, elle peut être ajustée via un logiciel pour répondre aux exigences du projet.
Oui, il est toujours recommandé d'utiliser des composants externes tels que des diodes et des condensateurs lorsque vous vous connectez à des charges inductives ou à des charges à base de moteurs afin d'empêcher la force contre-électromotrice ou les pics de tension d'affecter le Raspberry Pi.




















