All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(8 produits disponibles)





















 Prêt à être expédié
Prêt à être expédié













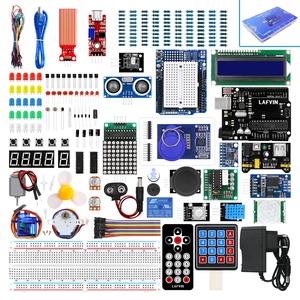
Les tutoriel de moteur pas à pas Arduino constituent un composant essentiel dans le monde de la transmission de puissance, particulièrement dans les applications nécessitant un contrôle précis du mouvement. Ces moteurs sont conçus pour se déplacer par étapes discrètes, ce qui permet un positionnement exact et une répétabilité élevée, des atouts cruciaux dans des domaines tels que la robotique, l’impression 3D et les machines CNC. Contrairement aux moteurs traditionnels, les tutoriel de moteur pas à pas Arduino ne requièrent pas de systèmes de rétroaction pour déterminer leur position, ce qui les rend à la fois simples, et peu coûteux pour de nombreuses applications. Leur capacité à être contrôlés via des impulsions numériques les rend également très compatibles avec les systèmes électroniques modernes, assurant un pont entre mouvement mécanique et contrôle digital.
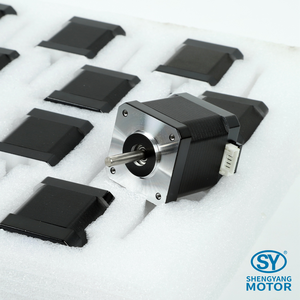
Il existe plusieurs types de tutoriel de moteur pas à pas Arduino, chacun adapté à différents besoins et applications. Les types les plus courants incluent les moteurs à aimant permanent, les moteurs à réluctance variable et les moteurs hybrides. Les moteurs à aimant permanent utilisent un rotor à aimant permanent et sont appréciés pour leur simplicité et leur coût, idéaux pour des applications à faible couple. Les moteurs à réluctance variable, quant à eux, n’utilisent pas d’aimants ; ils sont plutôt basés sur le principe de la réluctance magnétique, ce qui leur permet d’atteindre des vitesses de pas élevées. Les moteurs hybrides combinent les avantages des moteurs à aimant permanent et à réluctance variable, offrant des performances supérieures, un couple élevé et une résolution de pas fine. Le choix d’un tutoriel de moteur pas à pas Arduino dépend donc largement des exigences spécifiques de l’application, comme le couple nécessaire, la vitesse souhaitée et la précision requise.
Les tutoriel de moteur pas à pas Arduino offrent une gamme de fonctions et de caractéristiques qui les rendent indispensables dans de nombreuses applications de précision. L’une de leurs fonctions principales est de convertir des impulsions numériques en mouvements mécaniques précis, permettant un contrôle pointu de la position, de la vitesse et de l’accélération. Les caractéristiques clés des tutoriel de moteur pas à pas Arduino incluent un couple élevé à faible vitesse, une stabilité de mouvement à vitesse lente, et la capacité de maintenir une position sans nécessité d’alimentation électrique. Ces caractéristiques les rendent particulièrement utiles dans des applications où un positionnement précis est primordial, comme dans les imprimantes 3D et les machines CNC. De plus, les tutoriel de moteur pas à pas Arduino sont reconnus pour leur durabilité et leur fiabilité, demandent souvent moins de maintenance que d’autres types de moteurs grâce à leur construction simple et à l’absence de balais.
La construction des tutoriel de moteur pas à pas Arduino repose sur l’utilisation de matériaux spécifiques sélectionnés pour optimiser performance et durabilité. Le rotor est généralement fabriqué à partir de matériaux ferromagnétiques de qualité, qui permettent d’améliorer la performance magnétique et l’efficacité du moteur. Le stator, qui abrite les bobinages, est souvent fait d’acier feuilleté pour minimiser les pertes par courants de Foucault. Les bobinages de cuivre sont largement utilisés dans les tutoriel de moteur pas à pas Arduino grâce à leur conductivité électrique, assurant une conversion efficace de l’énergie électrique en mouvement mécanique. Les matériaux employés dans les tutoriel de moteur pas à pas Arduino sont choisis pour offrir un bon équilibre entre performance, durabilité, et coût, assurant ainsi un fonctionnement fiable dans des environnements exigeants. Les progrès dans le domaine de la science des matériaux continuent de permettre des améliorations significatives dans l’efficacité et la performance des moteurs pas à pas.
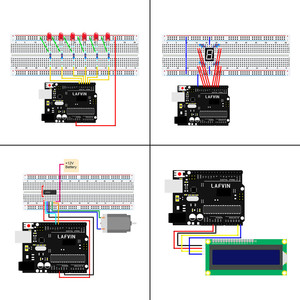
Pour utiliser efficacement les tutoriel de moteur pas à pas Arduino, il est important de comprendre leurs principes de fonctionnement et leurs limitations. Le choix approprié du type de moteur pas à pas en fonction des besoins de l’application est crucial, notamment en termes de couple, de vitesse, et de précision. Les tutoriel de moteur pas à pas Arduino doivent être alimentés par un contrôleur approprié, adapté aux spécifications du moteur, pour assurer un fonctionnement précis et fluide. Il est également important de respecter les tensions d’alimentation et les limites de courant recommandées afin d’éviter la surchauffe et de maximiser l’efficacité du moteur. Dans les applications nécessitant une haute précision, l’utilisation de techniques de microstepping peut grandement améliorer la résolution et la finesse du mouvement. Une maintenance régulière, incluant la vérification des connexions électriques et l’assurance d’un refroidissement adéquat, peut contribuer à prolonger la durée de vie des tutoriel de moteur pas à pas Arduino et à maintenir leur performance au fil du temps.
Lors de la sélection de tutoriel de moteur pas à pas Arduino pour votre application, plusieurs facteurs doivent être pris en compte pour assurer une performance optimale. Le premier élément à considérer est le couple requis, qui détermine la capacité du moteur à déplacer ou à maintenir une charge. Les applications exigeant un couple élevé peuvent bénéficier des moteurs hybrides pas à pas, tandis que celles nécessitant un couple inférieur peuvent opter pour les moteurs à aimant permanent. De plus, l’environnement de fonctionnement joue un rôle crucial ; par exemple, les moteurs utilisés dans des conditions difficiles devraient avoir une construction robuste et des matériaux résistant à l’usure et aux intempéries. Il est également vital de considérer la résolution de pas souhaitée, car un pas plus fin permet un contrôle plus précis.
Comprendre les spécifications des tutoriel de moteur pas à pas Arduino est essentiel pour faire un choix éclairé. Les spécifications clés incluent l’angle de pas, qui affecte la résolution et la fluidité du mouvement. Un angle de pas petit permet un contrôle précis, utile dans des applications telles que les machines CNC. Les valeurs de tension et de courant sont également critiques, car elles déterminent la consommation d’énergie du moteur et son efficacité. En outre, le couple de maintien indique la capacité du moteur à maintenir sa position lorsqu’il n’est pas en mouvement, important dans les applications nécessitant stabilité et précision. Évaluer ces spécifications permet de choisir un moteur adapté aux demandes spécifiques de l’application.
Les tutoriel de moteur pas à pas Arduino sont largement utilisés dans diverses industries grâce à leur capacité de contrôle précise. Dans le domaine médical, ils sont utilisés dans des équipements tels que les pompes à perfusion et les machines d’imagerie, où un positionnement exact est crucial. L’industrie automobile utilise ces moteurs dans des systèmes requérant un mouvement fiable et répétable, comme dans les commandes d’accélérateur électroniques. Dans le secteur de l’électronique grand public, ils sont essentiels dans des dispositifs comme les imprimantes et les caméras, offrant un mouvement précis pour des résultats de qualité. Chaque application nécessite une considération particulière des spécifications du moteur pour s’assurer qu’il répond aux critères de performance nécessaires.
La principale différence entre tutoriel de moteur pas à pas Arduino et servomoteurs réside dans leurs mécanismes de contrôle. Les moteurs pas à pas fonctionnent par étapes discrètes et ne nécessitent pas de système de rétroaction pour le contrôle de position, ce qui les rend plus simples et souvent moins coûteux. Les servomoteurs, quant à eux, utilisent un système de rétroaction pour atteindre une position précise, offrant ainsi un mouvement plus fluide et une vitesse accrue.
Pour augmenter la précision de tutoriel de moteur pas à pas Arduino, des techniques de microstepping peuvent être employées, qui divisent chaque pas complet en incréments plus petits. Cela permet d’améliorer la résolution et la fluidité du mouvement, augmentant ainsi la capacité du moteur à réaliser des mouvements fins. De plus, ajuster convenablement les paramètres du contrôleur et minimiser le jeu mécanique peut contribuer à une précision accrue.
Alors que les tutoriel de moteur pas à pas Arduino sont adaptés aux applications nécessitant précision à faible vitesse, ils peuvent aussi être utilisés dans des scénarios à haute vitesse en choisissant le type de moteur et le contrôleur appropriés. Les moteurs hybrides pas à pas offrent souvent une meilleure performance à des vitesses élevées grâce à leur design. Toutefois, il est important d’assurer que les spécifications du moteur soient alignées avec les exigences de vitesse pour éviter des problèmes de performance.
La maintenance des tutoriel de moteur pas à pas Arduino consiste généralement en une vérification régulière des connexions électriques et en l’assurance d’un refroidissement efficace pour prévenir la surchauffe. Contrairement aux moteurs à balais, les moteurs pas à pas n’ont pas de pièces susceptibles de s’user, ce qui réduit la maintenance nécessaire. Cependant, une inspection périodique des composants mécaniques et une lubrification adéquate peuvent être nécessaires pour maintenir une performance optimale.
Oui, tutoriel de moteur pas à pas Arduino peuvent être utilisés dans des appareils fonctionnant sur batterie, à condition que la consommation d’énergie du moteur soit compatible avec la capacité de la batterie de l’appareil. Choisir des moteurs avec des valeurs de tension et de courant faibles peut aider à prolonger la durée de vie de la batterie. De plus, utiliser des circuits de contrôle efficaces peut réduire la consommation d’énergie, les rendant adaptés pour des applications portables.